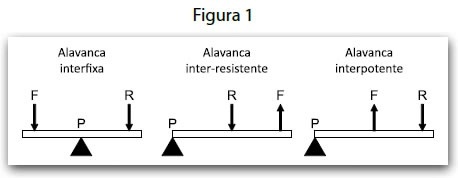
De acordo com a mecânica clássica, são reconhecidos três tipos básicos de alavancas: a interfixa, a inter-resistente e a interpotente, definidas de acordo com a posição relativa da força potente (F), da força resistente (R) e do ponto de apoio (P), conforme a figura 1.
Os seres vivos utilizam esse tipo de mecanismo para a realização de diversos movimentos. Isso ocorre com o corpo humano quando, por exemplo, os elementos ósseos e musculares do braço e do antebraço interagem para produzir movimentos e funcionam como uma alavanca, conforme a figura 2.
Nessa alavanca, o ponto de apoio está localizado na articulação entre o úmero, o rádio e a ulna. A força potente é aplicada próximo à base do rádio, onde o tendão do bíceps se insere, e a força resistente corresponde ao peso do próprio antebraço.
Com base nessas informações, é possível concluir, corretamente, que a contração do bíceps provoca no membro superior um movimento de




 a força peso do coco e
a força peso do coco e  a força exercida pelo bíceps sobre o osso rádio no ponto P (pertencente ao segmento
a força exercida pelo bíceps sobre o osso rádio no ponto P (pertencente ao segmento 







